本記事はかわロボアドベントカレンダー2025向けに作成しています
かわロボ(社会人、ベテラン) Advent Calendar 2025 - Adventar
結構長いので全文読む必要はないと思います
目次を作ったので、お好みのところだけ召し上がってください
はじめに
去年から、3Dプリンタで作るかわロボというテーマで日頃ブログを書いています
今年も去年に引き続き3Dプリンタでかわロボを作ってました
かわロボ非公式大会(○○杯)にたくさん参加しました(本大会は抽選落ち)
その中で中島杯ベスト8、ヤガボット4位、立命杯ベスト8と、好成績と言っても良さそうな結果を残せました(はい、みんな拍手!!!)

ヤガボット4位(アドカレ主催、レパード選手に敗退)

立命杯の決勝トーナメント表 右側下にハイランドタージが居る
いや~、一年でここまで戦えるようになるとはあまり考えてなかったので嬉しい限りです。
さておき。
去年のアドベントカレンダーでも「3Dプリンタで作るかわロボ」というテーマで記事を書いています↓
かわロボアドベントカレンダー 3Dプリンタで作るかわロボ - MJモノづくり工房
去年の記事では
- かわロボをやりたいけどCNCは買えず3Dプリンタなら用意できた
- 3Dプリンタ機体をとりあえず作ってみたら試合が出来た
- そこに至るまでに必要だった考え方等の共有
みたいな内容でした
今年は主に
- 2025年に製作した機体の紹介
- 練習会でもらった質問の回答
を通して3Dプリンタで作るかわロボのノウハウを共有出来たらな。と思っています
何かしらの参考になったら良いな。と思います
それでは。
今年製作した機体の紹介
時系列順に紹介
今年は3台作りました
ツインミドル

基本スペック
機体分類:ツインミドル
電源:ニッスイ6セルorニッスイ9セルorリフェ3セル(空いてる電池で戦える)
脚:ヘッケン3相 ギア比76.8 モータ380スポチュン1個ずつ計2個
アーム:リンクなし ギア比223.97... モータ380スポチュン3連装
重量:3280g(だったと思う)
その他:フルクロスなし 輪ゴムサス なんか知らんけど山越え出来る 6Vレギュレータで受信機駆動
どんな機体?
- 初めて小型シールド機以外の機体にチャレンジした機体
- 練習会でたまに勝てるくらいの性能
- 狙って山越えアタックが出来た
- あんまり使わずにバラしちゃった
3Dプリンタかわロボ第二段! ツインミドルロッド作ってみた - MJモノづくり工房
詳細は↑の記事に書いてあります
素で山越え攻撃が決まったり練習会でたまに勝てるくらいの性能はあるのですが、如何せん遊びで作った機体なので、思い入れがなく2回?くらい練習会で使って飽きて満足して、今は要素を剥ぎ取られ、私の知り合いでかわロボ作ってみたいという人にあげちゃいました
アームの先端がPLA生なので高速回転機とは戦わなかったです
弾けて破片が人にあたると嫌だったので。
去年のアドカレの記事で「大型機だとどうなるかわからない」という内容を上げましたが、大型機でも特段問題は感じませんでした。
ハイランドタージVer.4
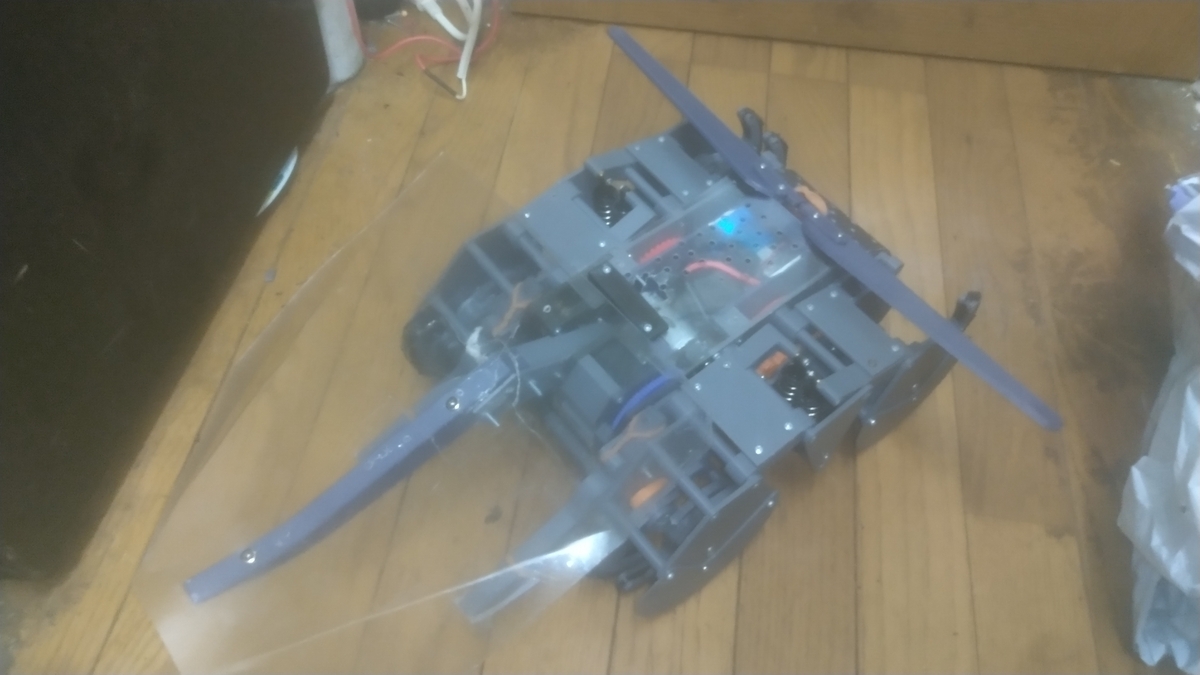
今年、大活躍した機体
私の今のメイン機体です
先に上げたトーナメント成績は全部この機体
最近、ハイランと略称をつけて呼んでる
ちなみに名前の由来は同名のパイプたばこの葉っぱの銘柄
基本スペック
機体分類:小型シールド機
バッテリ:リフェ3セル 2200mAh 40c
脚:タミヤ380スポチュン1個ずつ計2個 ギア比51.2 半径75mmくらい?(変更無し) 平行リンクサスペンション
アーム:タミヤ380スポチュン4連装 ギア比77.45 リンク無し アーム半径300mm弱(確か) 市販遊星ギアヘッド(ツカサKU→中華ギアヘッド)
重量:フルクロスなし約3100g フルクロス込み約3250g
その他:アーム角度制御アリ 展開式カウンタアーム ウイング搭載
どんな機体?
- (今のところ)メイン機体
- 制御が入っててアームがそこそこ強い
- 去年アドベントカレンダーで紹介したVer.3をより攻撃的にした
- 非公式大会でそれなりに良い成績を残した
3Dプリンタで作るかわロボ 2025新型小型シールド ハイランドタージver.4機体紹介 - MJモノづくり工房
↑過去に書いた機体紹介ページ
おそらく、私のことを練習会やTwitterで見かけている人はこの機体のイメージが強いと思います(だって、メイン機体だもん)
試合回数は200を越えた辺りからカウントしてないくらいには試合をこなしてます
ロールアウトから、かなりマイナーチェンジを繰り返していて、未だにマイナーチェンジをちょこちょこしている機体です
過去の紹介ページから大きく変わったのはアームの市販ギアヘッドをツカサ電工KUからアリエクで買った中華製の文鎮みたいなギアヘッドに変えたことですね
ちなみに市販遊星ギアでアーム減速器を作るのはシクロさん(からっ風)譲り?です
からっ風SS 2024年版|制作物|白黒サイクル

ギアヘッドを使ったアーム減速器 デメリットもあるけどメリットもそこそこある
後ろ側にあるウイングや展開型カウンタアーム、機体コンセプトみたいなものはCALPICO ORANGEさんをパクって参考にしています
未だに大きく負け越しています。強くなりたいならあちらを参考にした方がいいです…
今後もこのタイプの小型シールド機は作ると思います
ミッドタージ

ミッドタージ
基本スペック
機体分類:ツインミドル
バッテリ:リフェ3セル 2200mAh 40c
脚:4ユニット独立で各1つずつ、計4個 ギア比40 平行リンクサスペンション
アーム:タミヤ380スポチュン4連装 ギア比 リンク無し アーム半径 市販遊星ギアヘッド(中華ギアヘッド)
重量:上クロス込み約3300g(たぶん)
その他:アームサーボ制御 脚連動ケツブレード ウイング搭載 上部クロスで横回転対策
どんな機体?
- ツインミドルの先端をアルミにした(手加工)
- 最近流行りの脚連動ブレード付き(倒立スタートが早くなったらいいな)
- RCサーボモータのようなアーム制御
- 脚モータは4個独立搭載(ギアトレイン無し)
詳細は後日本ブログにて紹介(するつもりはある)
まだ始まったばかりの機体で、発展途上です
ぶっちゃけまだ弱いですね。使いづらい。
ツインミドルに対する理解度が浅いのも影響していると思います
いろいろと改良をしている最中です
11月に出来たばかりの最新機体
PDCAで言うとC→Aくらい
去年から機体構成が大きく変わった要素
去年の機体から大きく変わったのは
- バッテリをニッケル水素→リフェへ
- 一部、手加工のアルミ部品を使うようになった
- 市販パーツを使い始めた(ギアヘッドやフランジ)
です
バッテリをニッケル水素→リフェへ
去年までは価格の安さや、出力を抑えて自壊しにくくするという目的でニッケル水素バッテリを使っていました
正直、ニッケル水素でも練習会で3~5割勝率くらいの性能は確保できたのですが、どうしてもアームの出力に不満が大きく残りました
3Dプリンタ機体も慣れてきて出力を上げても自壊ばかりで楽しくない。とはならずに済みそうだなと思ったのでリフェを導入しました

リフェ3セル 9.9V表記がミソ
ただ、皆さんがやっているリフェ2セル2個直列4セル仕様ではなくリフェ3セル1個です
理由はリフェ2個セットを準備するのは高いし管理が面倒だからです。
これでかなりパワーアップ(ワット数的にも戦力的にも)しました
ニッケル水素の8セルも使ったのですが、無負荷の時の電圧はニッケル水素の方が高くても、内部抵抗等で最終的に出せる電流はリフェの方が大きいです
確実にトーナメントでの好成績に貢献している一要素です
やはりリチウム系電池はつよい。
アームの出力に関しては、まだ上げたいので、いずれ4セルになるかもですが、今は3セルで運用しています
一部、手加工のアルミ部品を使うようになった
今まで出力軸やアームの先端なども3Dプリンタパーツだったのですが
さすがに良く壊れるのでアルミにしました
電動ドライバーと金物用ノコギリ使って片手でペンチで押さえて…みたいな根性な手加工です

ミッドタージのアーム先端の加工 固定がちゃんと出来ないので結構大変だった

PLA+製の六角シャフトだと折れまくる(当たり前)のでアルミの六角棒に変えた
せめて、バイスは欲しいですね
市販パーツを使い始めた(ギアヘッドやフランジ)
アームのギアボックスは市販されている遊星ギアヘッドの流用をするようになりました(からっ風の真似)
3連装までなら3DPギアボックスで耐えたのですが4連装にすると難しくなってきたので、採用しました。
重たいですが、強度はあります
それに付随して、遊星ピニオンとドリブンギアとの接合にフランジが欲しくなったのですが、アマゾンやアリエクにフランジが今の時代豊富にそろっているので、そちらも導入しました
Amazonでも売ってるフランジ(凄い時代だぜ)
Amazon | 3.17mm フランジ形軸継手 2個入り リジッドフランジカップリング モーターガイドシャフトカプラー モーターコネクタ DIYパーツ用 内径3.17mm M3六角レンチ付き シルバートーン (3.17MM) | セットスクリューカップリング | 産業・研究開発用品 通販
アルミっぽい写真のくせに鉄製だったり、長さが記載されているのより2mmくらい長くて発狂したりはしましたが、まぁ、使えます
現状、これで重量も入っているのですが、レイアウトの自由度が下がるのがやはり何とも。
最近、なんだか3Dプリンタ遊星ギアでもイケる気がしているのでそのうち試します
一応、メリットとして、効率は市販遊星ギアの方が断然良いと思います
やはり、自作ギアより既製品ギアですよ。
今年受けた質問の回答(覚えている範囲)
去年に引き続き、今年も練習会にたくさん参加させていただきました
その際に、技術的な質問をたまに受けます。
参考になりそうで覚えているものを紹介します
Q.プリンタの機種は何ですか?
A.sovol SV06 そこそこ古いモデルのものです
2024年3月に買いました
当時、型落ちで25000円、更に謎割引で結局21000円の殆ど捨て値になっているものを買って今もそれ一台だけです
プリンタの性能は話を聞く限りだと今流行りのバンブー達より大きく劣ると思います
どちらかというとEnderとかに近い性能かなと。
買ってから15㎏以上のフィラメントをこのプリンタで消費しています
結構、しょっちゅう壊れますが騙し騙し使ってます
これから買うよという人はこの機種を買うメリットは全くないので、おとなしくバンブーシリーズ買いましょう。
Q.フィラメントは何を使っていますか?
A.基本的にはPLA+(ぴーえるえーぷらす)と呼ばれているものです
私が普段愛用しているメーカーは一応、伏せているのですが、ぶっちゃけAmazonでパッと調べて出てくるPLA+なら大体似たようなもんです
注意して欲しいのはプラスじゃない無印のPLAはめっちゃ脆いのでかわロボには向いてないと思います
2000~3000円前後のフィラメントを素材違いも含めると10種以上は試したのですが、私のプリンタだとなんやかんやPLA+が強度が出て使いやすいです
PLA+以外の素材も使っています
種類と使い分けは後述
Q.フィラメントは何種類使ってますか?
A.意識して使い分けているのは大体3種類くらい
現在、使い分けを意識しているのは
になります
PLA+を基準により耐熱性が欲しい箇所にはPETG-GF、多少割れやすくても良いから軽くしたいところにはPLA-CFを使っています
GF添加は無添加と比べて比重が重くなります
GF、CF共に無添加に比べて少しだけ耐熱温度が上がります
GF、CF共に無添加に比べて積層接着力が下がります(割れやすくなる)
GF、CFで耐久応力が上がる(いわゆる強度が上がる)なんて触れ込みが多いですが、正直、積層接着力が下がるので眉唾かなと。
ただ、表面硬さはたぶん上がっているのでGFないしCF添加素材は気持ち雌ネジの耐久性が良いので雌ネジがちゃんとして欲しいステーなんかに使ったりします
PETG-GF使用例:脚モータマウント
写真

モータマウント(アイボリー色)はpetg-gf モータ側にアルミテープを貼って少しでも放熱性を上げている ヒートシンクも付いてる
どうしてもリフェ3セル380スポチュン1個ずつの脚モータの発熱だとPLA系統は熱変形してしまいギアの噛み合わせが最悪になってしまうので使用してます(2個ずつだと発熱はそこまでなく、PLA系統でも耐えてた)
ただのPETGでも耐熱は問題ないと思うが、剛性と強度が低くて気になったのでGF
GFだと重いのでCFにしたい
PLA-CF使用例:脚先(脚裏ゴムが接着されてる部分)

チョコレート色の部分がPLA-CF
脚先はなるべく軽くしたいのと、強度を上げても回転シールドの前には皆同じ。って感じなので多少割れやすくても軽いPLA-CFを使っています
これでも自走してここが壊れたことは今のところないですが、良かれと思ってCF配合の物にしたら積層面で剥離して壊れるというのはよくあるので使いどころの見極めが必要です
あとは、構造的か形状的に剛性が確保できる場所に使ったりもしますが、チクチクするし高いのでなるべくなら使いたくない
Q.色が違うところは何か意味があるのですか?
A.あるところとないところがあります。ぶっちゃけほぼないです
先に上げたようにフィラメントの種類の使い分けで色が違うこともあるのですが、大抵はその時安かった色のフィラメントだったりします
機体を作る前に機体のイメージカラーだけ決めて(ハイラン→灰色、ミッド→赤(赤い機体は強い))、その後の改良などでは色のこだわりを無視してることが多いです
フィラメントの価格は人気色程高くて、不人気色は安くなっていることが多いので、比較的見えにく箇所の色はバラバラだったりします
一応、時期によって、なるべく違う色を買うようにして、印刷した時期がわかりやすくなることもありますが、まぁ管理は殆ど出来てないです。突っ込まないで。ぼろが出る。
Q.380の先のギアはどうしていますか?
A.RCバギー用で380向けM0.8のピニオンギアがあるのでM0.8で初段から3Dプリンタギアになっています
地味に多い質問です
それくらい、皆さん苦労する箇所なんですね。
かわロボ勢の多くは380ピニオンと相手のドリブンギアはKHK製M0.5のピニオンとLSギアSSギアなどの既製品のボスにガッツで追加工して多段ギアにしていると聞きます
中には血反吐を吐きながらM0.5のドリブンギアを切削して作っている人もいますね
どちらにしても金属でギアを作るには最低でもCNCが必要なので私には出来ない手法です
とはいっても積層式3DPでM0.5のギアの製作も、細かすぎてなかなか難しいです(積層式は細かい造形は苦手)
ということで、大人しくモジュールを上げてM0.8を使っています
M0.8ならば0.4mmのノズルでも印刷出来ます
ピニオンはタミヤのラジコンでグラスホッパーやホーネットという機種が380モータでM0.8を使っているようで、そちらを使っています

左M0.8t10 右KHKのSS0.5-8A(みなさんお馴染み)
あるいは、スポチュンについてくる真鍮製の丸パイプがΦ3.17とΦ2.3の変換になっているので、540用でM0.8のピニオンを使ったりもします

一般的なラジコン用ピニオンの内径は3.17mmだが金色のパイプを使うと2.3mmに変換できる
いずれにしてもモジュールが大きい分、ピニオンやドリブン直径が大きいので初段の減速量的にギアの段数が増えてしまって省スペース設計が難しくなったりします
そこは腕の見せ所だと思います。頑張って。
また、最近流行りのバンブー製品だとM0.5のギアが、そこそこすんなり印刷できるみたいです。
かわロボ界隈だとAlice-K氏がバンブープリンタでM0.5ギアを印刷して使用しているようです
tom3reimu.exblog.jp
私も最新機のミッドタージには3Dプリンタ製のM0.5ギアを採用してみているのですが、かなり苦戦しています

最近ようやく、うちのプリンタでもそこそこM0.5ギアを印刷できるようになった
そもそもM0.5だとギアの組付け精度にかなりうるさくなるので、樹脂フレームには不向きなのでは?と思うのと、樹脂ギアで金属ギアに比べて、より歯の強度がシビアなのも尚更組付け精度にうるさくなる要因なので
まずはM0.8で作る方が苦労は少ない気がします(アルミでも同じかも)
A.まぁ、なんとか…
3Dプリンタ製歯車をふんだんに使っているわけですが、モジュールが極端に小さい(M0.5は極端に小さいと思う)もしくは極端に歯数が小さい(歯数10以下等)だと壊れることが圧倒的に多くなりますが、一般的な歯車の歯幅、歯数、モジュールだとそれなりに耐えます。
基準はKHKのPSギアのラインナップでしょうか。(かわロボだとあそこまでゴツくするのは難しいけど)
POM切削よりちょい弱いという認識で設計をしたら、大きく外すことはないと思いますが、アルミと同じモジュールや歯幅だと泣きを見ます
私の場合は初段以外はモジュール2歯幅5mmを基準にモジュールと歯幅を決定しています
とりあえず、何となく決定して実際に作ってみて割れたら歯幅を増やしたりプラス転位を割れなくなるまで繰り返しています
ギア以外の要素でもそうですが、大切なのは、強度が心配なところはなるべくスペースを確保するなどして、壊れまくるようならあとからの設計変更で剛性を上げられるようにすること。だと思います
また、3Dプリンタならでは、の手法として、”はすば”や”やまば”歯車にして強度確保も可能です
同じ歯幅歯数モジュールだと3Dプリンタ製でもちゃんと平歯車より強くなります(実体験済み)
ただ、やまば等で強度が上がることを前提にすると失敗しやすいです(軸間距離が変わったり)
また、ギアの場合はイレギュラ的な負荷、例えばアームの上げすぎによるロック等は上記の工夫でどんなに頑張っても耐えませんでした(アルミでも耐えないと思う)
私は、リミットスイッチやアームの制御などでロックしない対策しました
今は専ら制御です
Q.ケミカルクラックは大丈夫ですか(ネジロック等)
A.ケミカルクラックはしてると思うけど、意外と大丈夫
脚のクランク周りや、メンテナンスしにくい部分など、かなり多くの場所にいわゆるネジロックを使っています
ケミカルクラックして困るというシチュエーションは記憶にないです
もちろん、3Dプリンタパーツになるべく付かないようにネジに薄く塗布する程度、等出来る限りの気遣いはしています
定量的な検証はしていませんが、おそらくポリカのケミカルクラック度合い?よりPLA系統のケミカルクラックの方がマシなんじゃないかな?と思っています
足裏ベースにポリカ切削パーツにPPXでシリコンゴム。みたいな構成をPLA系統に置き換えると作りやすいし、PPXの食いつきが良いし、ケミカルクラックが少ないかもしれないので置き換えしやすそうだな。と思っていたりもします。
どちらかというと濡れたしする方が強度が落ちる気がします
雨の日はキャリーの中で更にゴミ袋二重で機体をくるんで運搬しています
Q.スペーサってどうしてますか?
A.3Dプリンタで作っちゃってます
スペーサというといろんなものがありますね。円筒状の物に雌ネジがあるのや、単に円筒なだけの物や、六角軸とベアリングの間に入れるものなど
今あげたもの、全て3Dプリンタパーツで賄っています

”スペーサ”達
3Dプリンタ製スペーサは弱いのは弱いのですが、使えないこともないです
雌ネジがあって長いスペーサは相手の片側と一体成型パーツにしてしまうことです

一体パーツ 印刷時間は掛かるが、強度は上がるし組立が楽になる
こうすると、組立が楽ですし分割するより耐えます
ネジをちょっと長めのを使うと強度が更に上がっていい感じです
細かいスペーサやシムみたいなものを一体成型化出来るのは3Dプリンタ部品のいい所かなと思います
また、スペーサの形状に特にこだわりがないのなら四角くして寝かせて印刷すると、かなり耐えます
円柱、六角柱形状だと寝かせて印刷すると反ってしまって上手く印刷できないことが多いですが、四角だと比較的何とかなる
スペーサの幅?直径?は8mmを基準にしています
スペーサの雌ネジをどうしているかは後述の回答にて。
人によってはスペーサを自作するのは時間の無駄。買った方が良いという人もいます。
その通りだと思います(笑)
ただ、3DPスペーサならさほど苦労せずに買うよりも、そこそこ安価に製作可能なので、そんなに悪い選択肢ではないと思います
自作スペーサは設計変更に強いのも3DP機体との親和性が高いです
Q.雌ネジ加工はどうしていますか?
A.締結によって3つ使い分けています
- セルフタッピングネジ
- 熱圧入ナット
- 六角ナット埋め込み
締結力がさして必要ない箇所にはセルフタッピングネジや熱圧入ナットを使っています

セルフタッピングネジと 熱圧入ネジと 普通のナット
セルフタッピングネジとは木ネジみたいな奴のことです
木ネジと比べると少しだけピッチが狭くなっています
色んなタイプがあり、3Dプリンタに対しては2条ネジの方が良いらしいのですが、単価がとても上がるので私は安価な1条ネジを使っています
ネジ種類参考↓
樹脂用セルフタッピンねじ|オオサカ精機株式会社
下穴は呼び径の直径でモデリングすると、印刷の際にどうせ穴がつぶれるので、いい感じの下穴径になります(M3ならΦ3でモデリングすると実寸法がΦ2.8とかになる)
熱圧入ナットは真鍮製のインサートナットのことで、印刷後に、はんだごてを使って母材を熱変形させながら挿入します
そこそこ使えるのですが、PLA+だと母材が弱いのでナットの外側が舐めてしまったり、締結していくとナットが浮き出てきてしまったりと、本気で絞めてしまうとトラブルが起きたりします
セルフタッピングでも並目ネジでも少し長めのネジで深く入れると舐めにくいです
最初はセルフタッピングで組んで、メンテや設計変更をするうちに舐めてきたら熱圧入に変える。というのが多いです
最近はヘリサートも覚えたので使っていますが、こちらは結局母材に並目程度のピッチのタップの耐久性依存なのでやはりそこまで締結トルクは出せないです(ヘリサートの外側のタップが舐める)
ただ、はんだごてを使わずに済むので、練習会などでセルフタッピングが舐めた時に使ったりは良さそうだなと思います
あと、穴の位置がヘリサートの方がズレなくていいですね
テーパ型のインサート(専用ポンチで広げるやつ)はまだ試してないです。
締結力がとても欲しい所には普通の六角ナットをモデル上で埋め込めるようにして使っています(脚のクランクの締結等)
ナット埋め込みの様子 ナット版ザグリのイメージ
六角ナット埋め込みは、一般的なナットで締結するイメージで考えます
ナット版ザグリ、みたいな認識です
このやり方だと六角ナットの締結力とネジの曲げ剛性と強度もPLA積層方向にプラスになるので結構強く締結出来ます。PLAが割れるのが先です。これでダメならネジ径を上げるなり金属にするなりが必要だと思います(イモネジ固定用のフランジなどを作らずにわざわざ買っているのはこの辺りが理由)
ただ、ナットを埋め込むので板状のパーツだとある程度厚みが必要になってしまうので、使用できる箇所はそれなりに限定的です。
私はトラスコで売られている薄型ナットを使っているのでt-3くらいならナット埋め込みを使っています
また、純粋な雌ネジというより反対側にナットがあるだけなので円筒状スペーサのような形状には使えません
外周が六角で真ん中が熱圧入みたいにくびれてる熱圧入用のナットがあれば最強な気がしますが、あるんですかね?(ありそう)
Q.3Dプリンタでかわロボをやってみたいのだけど、何からしたらいいですか?
A.とにかく作りまくりましょう
尋ねられ方は色々ですが、このような質問を良く受けます(特に学生さんから)
たぶん、かわロボに限らず、ものづくり系の趣味、全般に言えることだと思うのですが
ある程度自由に使える環境があるのなら、まずはガンガン作ってください
最初は笑われたりディスられたりするかもしれません。気にしなくていいです。(ディスって来た奴は実力で黙らせましょう。)
先に上げた細かいテクニックやノウハウや考え方はその先にあります。
作りたいと思っているだけですと、私からアドバイス出来ることはかなり限定的で、それこそググれば出てくることしか言えません。
ですが、一度「こういうのを作ったんだけどここが…」となると私もそうですが、それ以外の人からも(聞いてもいないのに)より具体的で建設的なアドバイスが聞けると思います
ちなみにハイランドタージシリーズは今ので5機体目です(ver.0が居たので)
5機体も作ってようやく戦略を真剣に考えられるレベルになったくらいなので、どうせ最初は失敗すると気楽にとりあえず作っちゃいましょう。
エンジニアリングとしては口だけでなく手も動かしたいところかなと。
アルミでも、その辺はたぶん同じです
PDCAサイクルを雑でもいいから爆速で回しましょう
スローガンは”ちっちゃいことは気にするな”(ワカチコワカチコ)で、いきましょう。
さいごに
私がブログ、Twitter、練習会(現物)で3Dプリンタ機体でも戦えるよ!というのを示した影響もあったのか?今年は3Dプリンタ機体がとても増えたと思います。
他の方のTwitterやブログでも3Dプリンタ機体の製作記録が綴られていますね。
今は学生だけどそのうちCNCが使えなくなる。でもかわロボは続けたい!という人が3Dプリンタ機体が気になる人が多いかなと思います
学校の環境でかわロボを作って遊べていた人ならば、能力的にはCNCレス、3Dプリンタでかわロボを作って遊べるかなと思います
3Dプリンタ機体で満足出来なかった場合、結局CNCを買うことになっても現在の環境でものづくりを趣味にするなら3Dプリンタが家にあるのは、それだけでアドだと思うので、あまり難しいことを考えずに3Dプリンタを買って挑戦してみても良いのかなと思います
私はしばらくCNCレスでかわロボを楽しむつもりです
何かありましたらTwitterや本ブログや練習会などで質問して頂ければ可能な限り答えます(なんでもは知らないわ。知ってることだけ)
今後ともよろしくお願いします

立命杯集合写真にて左ミッドタージ 右ハイランドタージ
p.s.社会人で新人(かわロボ歴5年未満)なのでどっちにでも(たぶん)書いて良いという特性を存分に使います(笑)
新人枠で書いた記事↓
ホビーウイングより安くてたぶん強いアンプ紹介 Surpass Hobby BDC80 - MJモノづくり工房
新米社会人の人だと安く上げたいですよね。
安く作るのはたぶん、私は得意なので参考にしてください。



























































